数字振动控制系统(VCS)是一个能对振动控制系统实施闭环控制的计算机系统。该系统可产生振动放大器所需的电子信号,进而驱动液压或电动振动器。UUT(测试件)上的振动响应则作为一个反馈控制信号,它们来自加速度,速度或位移传感器。控制器调整驱动输出,这样控制信号就精确的遵照预先给定的时域或频域。这里有很多的振动控制测量类型,有正弦、随机、正弦加随机、随机加随机、经典冲击、SRS、路谱仿真。
多数测量使用单轴振动台对结构进行激励。一些复杂的测试则需要多个振动台。在多个激振器的情况下,控制系统将包含MIMO(多输入/多输出)跨通道计算。多激振控制所使用的技术比单轴控制器要复杂的多。目前,EDM只支持单轴控制。
控制信号是指测试件上一个或多个传感器测量到的信号。如果控制信号偏离了规定的测试范围,那么可以对驱动信号做调整,使控制信号收敛于所需的范围。该控制系统连续、实时纠正振动台动态特性,测试件同时保持连续的反馈。当独立于PC系统的专用处理器用于控制回路,试验的安全性将被增强。
下面的方块图展示了闭环控制流程。加速度传感器被用来测量测试件响应,提供控制信号
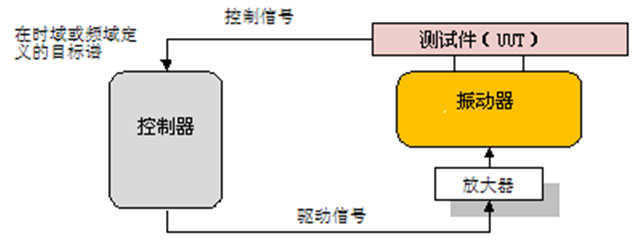
图41:硬件连接图
随机控制能够连续输出一个宽带的,随机的驱动信号,因此控制信号的功率谱密度应符合给定的频率范围。
正弦控制可以根据预先设定的计划连续的输出变换频率的正弦曲线信号。幅值调整使控制信号在给定频率范围内保持一个有效值。
经典冲击控制定义了其所需的时域参考谱。参考谱定义了短时间冲击信号的形状和幅值。冲击响应谱(SRS),对冲击信号在频域范围做了规定。路谱仿真控制则定义一长时间信号作为其所需的参考谱。
正弦加随机或者随机加随机,也叫做混合模式控制,将随机控制与另一个正弦或随机控制模式相结合,因此他们的测试设置更复杂。
市场上多数的控制器具备随机和正弦控制功能。大约50%要求有经典冲击控制。而混合模式、SRS、瞬态过程和路谱仿真被用在专门的应用场合。
即使只有一个激励源,也有必要在不同的点放置多个传感器作为控制回路的输入信号。这些测量点有多种用途,如下所示:
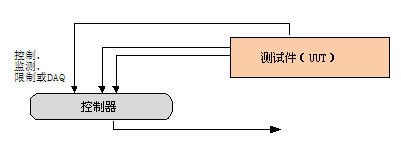
图42:控制器连接
当多个输入通道作为控制通道时,用户将要选择控制策略,如平均、最大或最小。例如,平均策略将所有的测量通道作为控制通道,并在频域用不同的加权因子来平均期影响。