作者:James Zhuge, Ph.D., Crystal Instruments (美国晶钻仪器公司)
振动控制器简介
振动测试系统被广泛用于航空、航天、电子、汽车等领域的可靠性试验。数字式振动控制器(振动台控制仪)是一个可以为振动台提供闭环控制能力的计算机系统,是整个振动测试系统中的组成部分,本文主要从硬件架构角度描述70年代以来美国振动控制仪的演化过程。
值得附带提出的是,早在80年代初,浙江大学的动态测试国家研究室和苏州实验仪器厂(苏试)就开始研发中国自己的振动控制器(振动台控制仪),浙大的杨世超教授是这个领域的先驱。而现在,苏试是中国该领域一家上市公司。
数字振动控制器产生电子信号驱动功率放大器,功率放大器再输出电流信号以驱动液压或电磁振动台,而作用于被测设备(UUT)上的振动响应反馈到振动控制器系统作为反馈控制信号。在闭环控制环境下,控制信号必须在时域和频域都遵循某种预先设定的特性,这些特性可以按照不同的工业或者军事标准定义为:正弦Sine、随机Random、正弦+随机SoR、随机+随机RoR、经典冲击、冲击响应谱SRS、路谱仿真等。
大多数情况下,单轴的振动台对结构进行激励,在一些高端测试中需要使用多个振动台形成多轴多自由度的激励,在多个振动台同时使用的情况下,控制系统需要具有多输入/多输出(MIMO)的互通道信号计算能力。用于多轴振动控制系统的技术比单轴系统要复杂的多,在本文中主要讨论单轴振动控制系统的情况。
控制信号要参考一个或多个从试件获得的测量信号,当发现控制信号与测试目标模型有偏差时,将调整驱动信号使控制信号趋近目标模型,控制系统实时、连续地对振动台进行动力修正以达到精确的控制,安全性检测通过一个分布式的不依赖于PC计算机的运算处理结构来进行。
下图说明了闭环控制的过程,传感器(如加速度计)用于测量试件的振动响应形成被控制信号。
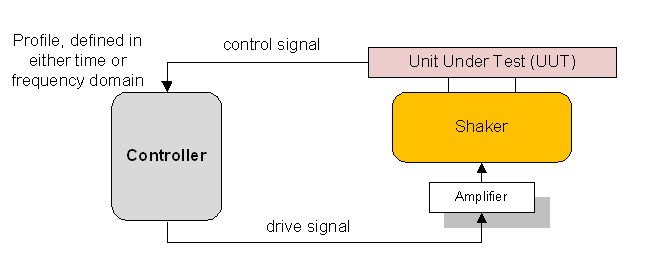
随机控制器将连续输出一个随机信号(驱动信号),其功率谱密度为预定义的频谱形状,这个预定义了形状的功率谱称为目标谱。正弦控制器将连续以某个确定的电压值输出一个扫频正弦信号,所以控制信号是类正弦信号,并且遵循预定义的幅值谱。经典冲击控制器在时间域中定义需要的控制目标模型。SRS控制在冲击响应谱中定义目标模型。路谱仿真控制器将一个长时间的时域信号定义为目标模型。正弦加随机或随机加随机也称为混合模式控制,把随机和其它控制模式结合在一起,其测试设置也更为复杂。
据估计市场上近乎100%的控制器都要求具有随机和正弦控制功能,大约50%要求有经典冲击功能。混合功能和SRS、瞬态历程及路谱仿真需求相对较少,只在一些特殊测试中需要。即使只有一个激励源,从试件上进行多点测量也是需要的,多点测量可用于如下一些需要:
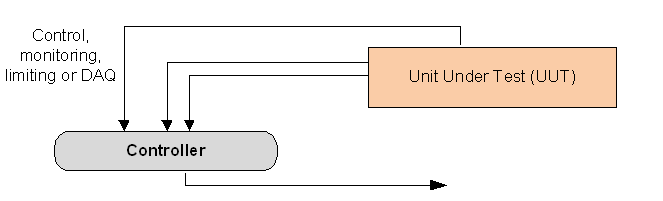
当使用多点输入作为控制通道时,用户可以选择不同的控制策略参数,如平均、最大或最小。如平均控制策略以全部测量通道的和为控制通道,并且平均结果在频域可以以不同的权重比进行。
第一代控制器-独立式
美国最早的数字振动控制器是在20世纪70年代由一些HP的工程师研发的。他们在早期最成功的信号分析仪HP5451上测试了多种控制算法。HP5451是基于小型机HP2100的一台设备,其内存和计算能力都很有限,工程师们使用了多种巧秒的办法取得了达到几千赫兹的实时带宽。Ron Potter和 Peter Moseley两位为这一早期的控制器作出了重大的贡献。
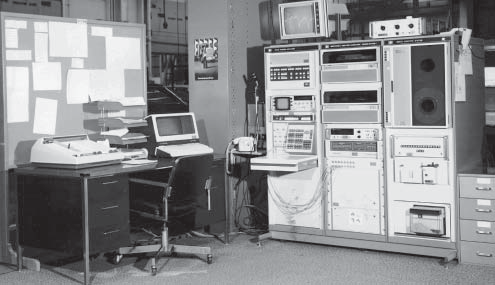
HP5451动态分析系统
在HP公司以HP5451成功地测试了这一算法后,HP5427作为一款商业化的产品在上世纪80年代出现。它由一些可堆叠的机箱组成,有专业的显示器和控制面板。HP5427是一款非常成功的产品,却由于惠普公司战略的调整而最终被放弃。
在上世纪70年代早期,另两位发明者,Edwin Sloane 和 Charles Heizman在一家名为Time Data的公司工作,取出得了一项随机振动控制的专利权。Time Data后来被GenRad公司收购后,发布了他们的独立式控制系统。GR25xx几乎是上世纪70年代后期最成功的控制器。下面是GenRad 振动控制器系统的照片:

GenRad 2506
后来GenRad的振动控制部门成为了Spectral Dynamics公司的一部份,Marcos Underwood博士是GenRad控制器的总工。在算法研发上,他专注于用“误差”控制取代HP采用的比例控制。Tony Keller也同样早期为控制器的研发做出了巨大的贡献。DEC公司的PDP系列小型机是振动控制器的硬件平台。
在上世纪80年代早期,LMS与HP合作,为HP的新硬件系统(Paragon)提供了全部的振动控制软件,LMS与HP的关系就有如微软公司与IBM的PC的关系。最终相比只提供硬件的IBM和HP,LMS和微软证明了软件销售更为重要。
早期的另一些厂商如Ling Electronics、MB Dynamics、Schlumberger等。由于都采用专用的硬件设备,早期的VCS系统售价在8~20万美元间,并且操作时需要非常仔细,然而得益于上世纪80年代航天、汽车和军事工业对结构测试的巨大需求,振动控制行业诞生了。很多今天使用的控制算法都是在当时产生的。规定大多数复杂的环境测试标准(包含了振动测试)的军标810标准,也是在那一时期建立起来的。
第二代振动控制器—基于PC的控制器
在上世纪90年代,IBM PC机在工业上得以应用。许多公司开始采用PC机进行数据采集和动态信号分析。Sri Welaratna 和 Dave Snyder两位原惠普公司的专家创建了Data Physics公司。Lansmont公司一项目与Data Physics的合作开发计划,开发基于PC机的数字式振动控制系统,最终造就了Lansmont公司的TTVI和DP公司的DP540控制器。这些早期的基于DOS操作系统的控制器具有在那个时代难得的图形用户界面。DP540采用了多块ISA总线的插入式DSP卡,每块卡有多个DSP处理器及A/D,D/A转换芯片。这一产品取得了巨大的成功。

Data Physics DP540
按照与DP540和DP550(Windows版的DP540)同样的思路,其它一些厂家也发布了他们的基于PC的振动控制器,如SD公司的Puma,UniDyn公司的DVC,Unholtz-Dickie公司的VWin等。
第二代振动控制器的产生得益于PC机和专用DSP处理器的发展,大大提高了其性能和易用性,同时成本却下降了。PC机的引入,使得显示、报告功能、连接性和系统性能极大地提高了。价格的持续下降使振动控制器系统能用于更多的商业应用中,如电子产品和包装测试领域。在系统价格下降的同时,振动控制器产品的市场规模却年复一年地在增长。
第二代振动控制器系统的缺点主要在于,系统过于依赖PC机的性能。这主要是由于其控制回路要通过PC CPU的安装在PC中的插卡。很多控制器使用ISA总线,其控制回路时间受限于PC ISA总线的中断和传输带宽。除了PC结构,LMS和M+P仍然依赖于HP的硬件来构建其软件系统,并采用UNIX操作系统,其产品包括Paragon 和 VXI 系统。他们主要面向那些在测试过程中需要大量同步数据采集的高端用户。
第三代振动控制器,PC 作为外围控制端的控制器
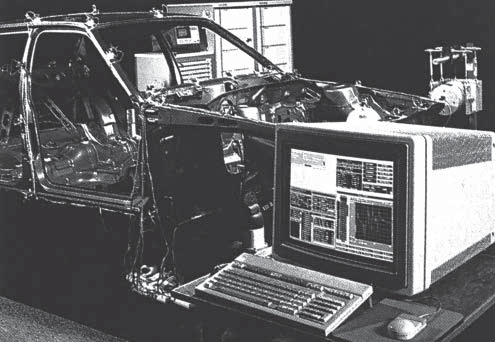
在上世纪90年代 Dactron 公司以开发新一代的振动控制器,Zhuge博士认为原有的系统存在技术上的缺陷,并且发现了改进的切入点。虽然这一代产品仍然使用PC机,但PC作用已经是外围设备了,因为在这种新的控制器中,控制回路已经不再经过PC机了。采用这一策略后实现了更加快速的回路控制时间。同时由于采用了浮点DSP处理器,在这一控制器中还实现了多种新的算法。
LASER是一个采用了多个浮点DSP处理器、24位∑-⊿型A/D转换芯片,以及PCI、USB总线等技术的振动控制器产品。应用软件系统采用微软MFC开发。新框架及新技术使得系统具有许多功能的同时仍然保持了易用性。Dactron公司的LASER系列产品取得了巨大的成功,数千台Dactron公司的LASER系统已经安装在世界各地。2001年LDS公司收购了Dactron,LDS是当时世界上最大的电磁振动台生产商,现在LDS已成为丹麦 B&K 公司的一部份。

LDS-Dactron LASER
在Dactron公司发布了LASER和Comet后,许多其它公司包括VRC和DP也发布控制回路独立于PC的第三代振动控制器系统。
第四代振动控制器—完全网络化的控制器
2010年,美国晶钻仪器公司 (Crystal Instruments) 发布了Spider-81,最新一代的振动控制系统。Spider-81充分采用了最新的硬件设计,信号处理算法和新的软件技术。

Spider-81 数字式振动控制器
Spider-81是第一个基于网络并支持IEEE 1588时间同步技术的振动控制系统。其基本模块可设置为4或8通道,且附加通道数可扩展了1024个。它提供了非常高的灵活性、测试精度和易用性。Spider-81配置了一个通道、明亮的LCD显示,数字I/O接口,内置备用电池和前面板控制键。Spider-81使用以太网接口。
作为第4代控制器Spider-81具有以下一些特点:
以数字信号处理器为主控的结构
与传统控制器过重依赖于外部计算机进行实时操作不同,Spider是第一个将时间同步以太网连接与嵌入式DSP直接直接集成在一起的控制器。这一策略极大地增强了控制性能、系统可靠性和异常保护能力,使得系统可以配置极大的通道数却不影响系统性能。
最新的硬件设计
Spider-81模块装备有电压主、电荷和IEPE输入通道,可适用于冲击、振动和声学测试及其它通用的电压信号测量。其内部闪存可以同时储存数百个通道的测试配置数据和实时分析数据。多个输出通道提供了各种与输入采样频率同步的信号波形。配备了一个能够显示测试状态信息的液晶显示屏。每台设备提供10个监测连接来读取模拟输入和输出信号,前面板上还有多个操作按键。通过内置的独立数字I/O和RS485串行端口可以连接到其他硬件。有一个紧急中止按钮可以在危急情况下中断测试。
简洁方便的网络连接
以太网连接方式使得Spider-81在物理距离上可以与PC机离开较远,这种分布式的结构方式大大减少了噪声和系统中的电子干扰。通过网络一台PC机可以监视和控制多台控制器。由于控制过程和数据记录都在控制器内部执行,网络连接方式并不会影响控制性能。通过无线网络路由器,PC还可以方便地采用WiFi方式连接远程的Spider设备。
多模块间的时间同步技术
Spider-81采用了IEEE1588时间同步技术,在同一个局域网上的Spider模块可以达到100ns的时间同步精度,即可以保证20KHz分析频宽下,通道间相位误差不大于±1度。采用这一技术和高速以太网使得分布于网络上的模块,可以象一台集中式设备一样进行操作。
黑匣子模式:脱离PC工作
Spider-81可以脱离PC机,以黑匣子模式进行工作。在这种模式下PC机在系统开始测试前,对设备进行配置,并将配置参数下载到设备上,Spider独立完成测试后,再与PC联机,PC可下载测试结果数据。在测试运行期间,控制器按预定的流程工作,并且用户可以通过前面板按键、远程手柄以及支持WiFi的PDA,如iPad等设备进行控制。
带LCD显示
每台Spider-81前面板都配置一块明亮的LCD显示屏,以实时显示系统状态和测试信息,如控制量RMS值、当前扫频频率等。
高可靠性设计
Spider-81是第一台设计有灾难保护功能的振动控制系统,甚至在网络断网或电源中断的情况下也具有保护功能。先进的安全控制回路在几毫秒内就可以检测到传感器掉线。Spider-81硬件经过了严格的环境测试,包括EMI、温度、跌落冲击、正弦与随机振动等。系统设计可以经受长期恶劣的工作环境而可靠地运行。采用浮地设计也减少了安装时的路接地问题。
高精度的输入设计
通过独特的技术,Spider-81是第一台能够达到150dB输入动态范围的振动控制器。每个输入通道在一个量程下就可以测试最小6μV 最大 20 V的电压信号,这就完全使得不再需要象传统控制器那样,在测试时对输入通道设置不同的输入量程。
优异的控制性能
通过改进的控制算法和高效的DSP结构,大大减少正弦和随机控制的反馈回路时间。更快的反馈回路时间能够提高搜索和驻留能力,以及对高Q值结构的控制性能。这也提供了更快的反应,更好的安全保障。
易于使用
Spider-81进一步改善了用户的界面等级。更多的图形指导、向导和工具的加入,使设置方便快捷。全新排列的接口使其更合理,更好用。“异常执行规则”、“终止灵敏度”和其他新接口的功能,使得操作更简单。数据库管理功能,更容易在大量的测试项目中通过关键字来进行搜索。
和模态分析,信号处理结合Spider-81集成了模态分析以及通用的信号分析功能,包括时间流记录,瞬态捕捉,FFT,自功率谱和传递函数分析。多个Spider-80 DSA模块能够和一个Spider-81的振动控制器模块组成一个集成系统进行工作。Spider-81具有长时间信号记录功能,对于关键的测试任务每个通道都可以采集时域数据并保存在内置的闪存中。
四代振动控制器的结构比较
四代振动控制器的结构不同

四代振动控制系统的结构比较
PC扮演的角色
第一代控制器不使用PC机,而采用专用的小型机,控制回路在小型机中。到第二代,PC是控制回路的一部份,数据通过PC的总线传递,这样的主要问题是任何PC性能上的影响都会干扰控制回路。在第三代,PC的作用主要是一个操作终端了。
在第四代控制器,高速数据通讯和精确时间同步都依赖于LAN。PC成为了LAN上的操作终端之一。用户可以选择以不同的方式,如无线、远程手柄、PDA或其它等,来操作控制器。虽然也有一些前期的控制器带有网络接口,但其不是针对高速网络来优化设计的,而且也不支持亚微秒的时间同步精度。
全网络型控制器比前几代产品提供了更多的优点,用户可以将控制器放置在离振动台较近的位置,而操作可以在远离数百米远的控制室内进行。PC可以作为设置和操作的终端,但在实验过程中也可以支持远程控制手柄或PDA设备进行操作。
实时计算性能
第一代振动控制器系统并不是真正的实时系统。实时性是指每一个输入的采样信号点都参与创建下一帧驱动输出信号。小型机的CPU在计算系统的传递函数时,其实忽略了许多帧的输入数据,其控制回路时间以秒计。
第二代振动控制器是实时系统。所有的采样点都用于计算驱动信号了。回路时间也小于1秒,利益于PC机的使用,用户界面大大改善,并降低了系统造价。
第三代振动控制器可称为“超实时”系统。它拥有用采样数据同时进行多任务的能力。如在Dactron的随机控制器中,在不同的频率段内,可同时运行多个控制回路。极端的情况如:正弦+随机控制器中,二个随机控制内核、12个正弦控制内核可同时运行,其控制回路时间也缩短到ms级。
第一和第二代通用控制器的出现是为了适应被试验物品(试件)的机械特性测试的要求。在一些应用中要求控制系统能够提供5KHz的实时控制带宽和高过70dB的控制动态范围,这是第一、二代控制器满足不了的,第三代控制器的出现改变了这一情况。得益于浮点DSP处理器和∑-⊿型AD转换器,
算法改进
依靠更先进的处理器,在这较新的控制器中,许多新的软件算法也得以实现。举例如下:
在Dactron的控制器中,采用了一个先进的滤波器技术,使得随机控制器在低频段可能获得较很高的频率分辨率,这一技术被称为多分辨率控制。
在Vibration Research的控制器中,峭度控制被集成到随机控制中,使得信号可以具有非高斯特性,从而更加接近从实际道路上记录的信号。
在Spectral Dynamics的控制器中,正弦控制器实现了一个形状更好的滤波器,相比采用矩形窗进行频谱分析的产品,其提供的通带特性非常平坦。
结论
在过去的40年里,振动控制器已经发展了四代产品,它们是第一代独立式、第二代基于PC的控制器、第三代PC依赖式和第四代全网络模式。其中第四代产品全网络式基于以太网和IEEE1588时间同步技术,它提供了比前辈产品优越的灵活性、可靠性、可配置性和延伸性。