随机测试
在随机振动测试中,由一宽带随机信号驱动振动台,通过回路信号调整该驱动信号,以产生一个与测试目标谱相符合的响应。这种控制算法可以计算输出驱动和输入控制通道之间的逆传递函数,是放大器、振动台和动圈之间的综合结果。产品的逆传递函数和响应谱可以产生一个输出驱动谱,然后相位随机发生器和逆FFT产生一个随机来驱动输出时间流。

随机控制过程
随机激励常常被用来模拟真实世界的振动。随机振动控制系统的目的是产生一个真正的随机驱动信号, 当经由放大器/振荡器施加到设备,将所得振动器输出频谱信号匹配用户指定的测试目标谱。此参考谱在(加速度)2每赫兹的单位频域中定义的。这个信号将被施加到试件上以验证该设备的在其服务的环境中发挥作用的能力。
如果被控制的一系列的组件(即,放大器,振荡器和测试结构)被假定为一个集成的线性系统,那么它可以通过在频域中一个系统传递函数H(f)进行说明。该控制和驱动信号的频率谱,Y(f)和X(f)中,可以通过H(f)联系在一起:
Y(f) = H(f) X(f)
或
X(f) = H(f) -1 Y(f)
H(f)-1称为逆传递函数
如果平坦频谱驱动信号激励一个摇床/测试条系统,得到的加速度响应谱不会是平坦的。电枢共振和试件的动力学上的反应使得所得到的频谱有峰(共振)和谷(反共振)。
将指定的谱应用到试件上,驱动器的频谱必须被改变以校正所述摇床/负载组合的动态。这个过程一般称为“均衡”。逆传递函数被连续计算测试过程中监测到的任何变化。进行实时更正。
得到所需的光谱R(f)(参考光谱或者目标谱),驱动所需的值可以计算为:
X(f) = H(f) -1 R(f)
X(f)所需的驱动信号的频谱。
一旦驱动器X光谱(f)是已知的,有几种方法可以生成一个随机的时域输出信号。这个信号必须有以下属性:
- 谱形状通过X(f)定义
- 消除不连续性
- 高斯振幅分布
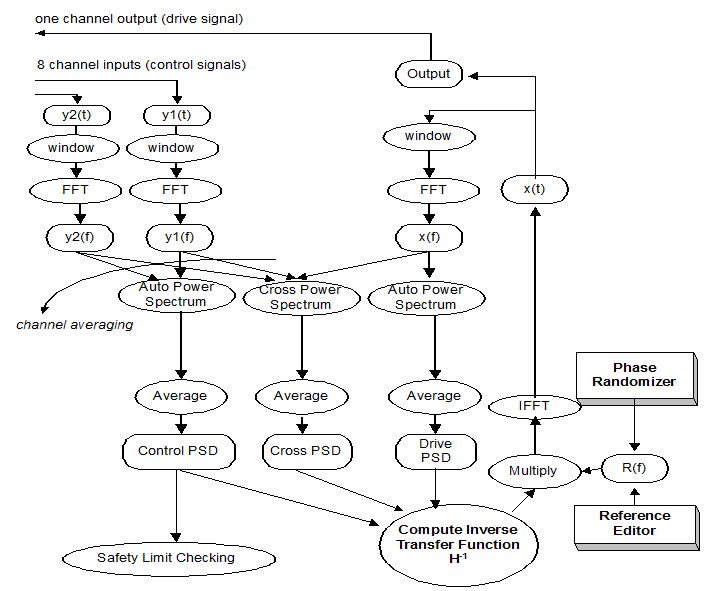
该算法包括以下步骤:
- 数字化输入信号和使用FFT处理将其转化为频域。
- 通过互谱估算经平均输入和输出之间的逆向传递函数。
- 生成具有随机相位的参考频谱。
- 参考谱乘以逆向传递函数,然后应用逆FFT将来产生输出的时间流波形。
- 通过一个D / A转换器,输出时间流波形。
所有这些计算在一帧的期间内完成,以确保一个非常快的控制回路的时间。
随机控制动态范围
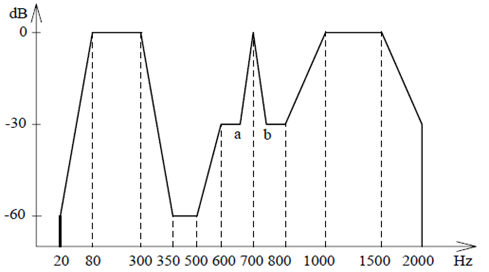
随机振动控制器(如:Spider-81)的关键要求之一是实现高控制动态范围。控制动态范围是比较控制信号中最高和最低光谱幅度的一种方法。Spider能达到至少90dB控制动态范围。这可以通过修改的中国测试标准JJG-948来衡量。JJG-948只要求控制动态范围到60dB。通过对噪声下限的修改,可以显示出更高的控制动态范围。
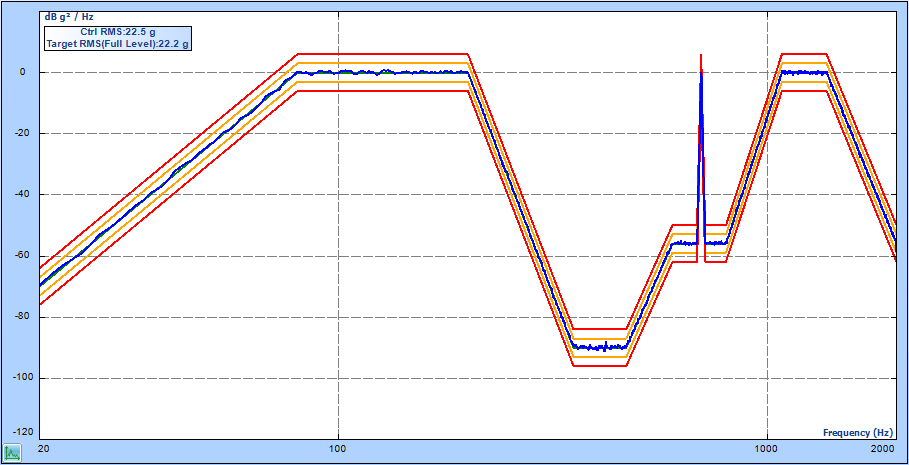
Spider-81 振动控制仪-90dB随机振动