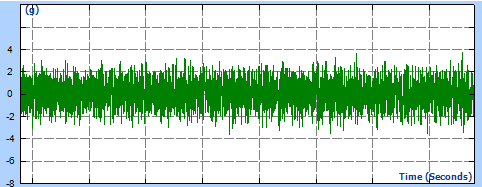
高斯随机振动波形
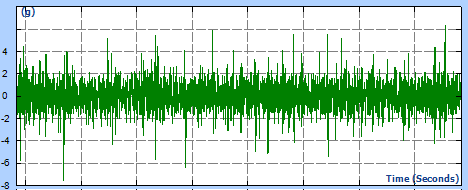
随机振动波形峭度=7
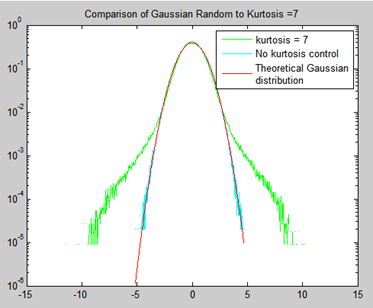
下图显示两个测试的振幅分布的差异。幅度分布可以用直方图来测量。由此可以看出,具有较高峭度的测试,分布图尾部延伸得更远。控制器通过调整随机生成的驱动信号的相位来改变这个幅度分布。因为只有相位被改变,振动的频率成分没有受影响。
Spider 随机测试模式中的峭度控制用于控制随机振动的振幅分布。峭度控制,测试可以更好的模拟现实世界的环境。
在现实世界中的许多振动的环境中,信号都具有高峭度值的特征(相对于高斯随机)。这些环境中的振动疲劳和损坏力比纯高斯随机信号高。因此,采用传统的高斯随机信号作为测试信号实际上只能在产品的服务环境中进行测试。
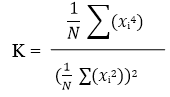
峭度可以用一个标准化的K值表示,这个值是由第四统计矩除以第二统计矩的平方得来。下面的等式为N个采样点时的K值计算。
无峭度控制,随机振动控制仪(如Spider-81)的输出分布是高斯分布。这意味着,大峰是比较少见的;随机波形值在98%的情况下将小于4倍的RMS值。真实世界的振动,例如汽车驾驶在粗糙路面的振动,峰值通常为RMS值得5至10倍。峭是这种“峰度”的量度,与幅度分布相关。具有较高的峭度的随机振动在该分布的下包含更多的“离群值”峰。纯高斯分布峭度值总为3,而现实世界振动峭度一般为5到8。
通过增加随机振动峭度值以匹配预期的真实世界的振动的峭度,振动测试将更加紧密地匹配实际环境。
左侧显示了从两个测试中得到的振动信号,他们使用相同的RMS及频率分布。然而,在第二张图中所示的振动波形峭度为7,而第一张图中的振动波形为高斯分布。