MIMO振动控制综述
在过去十年中,随着多振动台系统的发展、多输入多输出MIMO 控制器的可用性以及标准(例如,IEST DTE 022工作组建议的Mil STD 810G方法527 )的制定,MIMO振动控制系统获得了巨大的发展势头。多振动台试验系统已经被用在军事、国防和航天领域,以及商业和汽车工业。
在现实世界中,结构振动是从各个方向的来源被激发的。为了模拟真实的振动环境,需要同时在多个方向上执行激励。MIMO试验对于许多应用是必要的,例如大型结构测试,仅使用单个振动无法提供有效的安装或者足够的推力,以及试验要求同时进行多轴向振动激励时。SDOF测试不足以满足规范要求正确分配的振动能量时,建议进行MIMO测试。
具有同时多方向激励的MIMO试验,可以减少总测试时间,因为省去了改变DUT在工作台的固定方向(例如,从垂直到水平)的时间。一般而言,MIMO试验可以在受控制的情况下向测试物件多个轴向提供振动能量的分布,而不依赖于测试物件的动态特性来实现这种分布。对于长细物理构造的测试物件,采用单个振动台试验时必须依赖于测试物件的动力学特性来分配能量。对于大型和重型试验物品,可能需要一个以上的振动台来为试验项目提供足够的能量。MIMO试验允许在更多自由度上匹配测试物品的阻抗和边界使用条件。
多振动台系统的形式从多激振器单轴( MESA)到多激振器多轴( MEMA ),涉及2到6个振动台,或者更多,可组成单轴、三轴平移振动台、6DOF 多轴振动台(MAST )等。


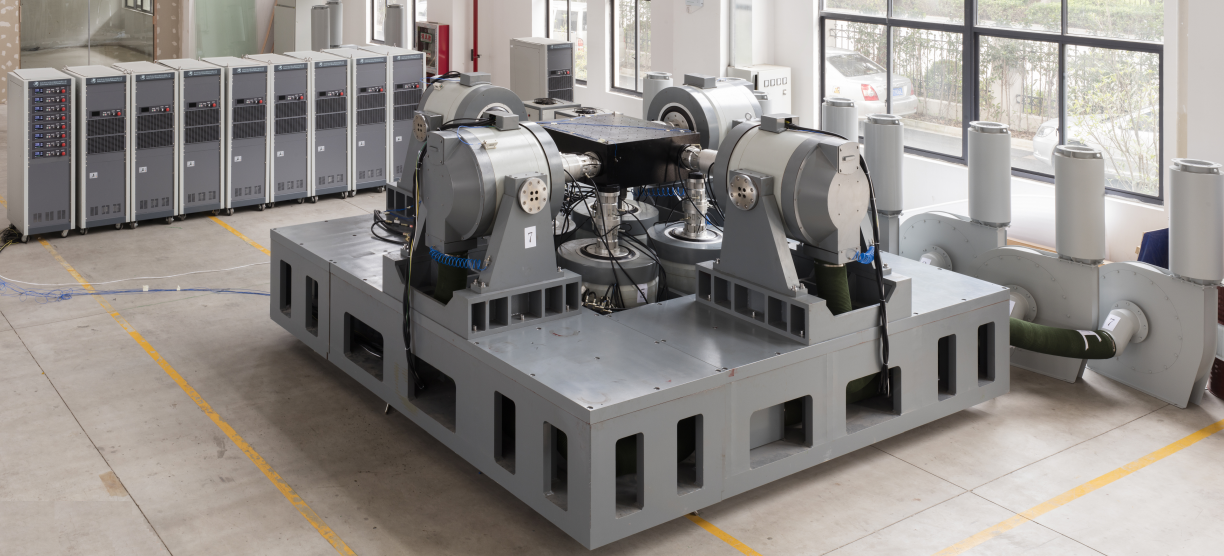
Sentek三轴振动控制台
Spider MIMO振动控制系统利用多个振动台,多个控制通道可以分定义目标谱。控制过程相比单轴振动控制的一维方式,MIMO控制扩展成一个矩阵的形式。
对于振动台数量X等于m且被控制量Y等于n的振动器系统,它将遵循系统方程,
{Y}nx1 = [H]nxm {x}mx1
[H]nxm是系统传递函数矩阵,通常在预测试阶段进行评估。{Y}是响应(控制)的线性谱向量,而{X}是驱动的线性谱向量。
控制通道的数量可以与驱动信道的数量相同,这被称为平方控制;或者它们可以是不同的,这称为矩形控制。当控制的数量大于驱动器(振动器)的数量时,它是过定义的控制。在相反的情况下,它是欠定义的控制。平方控制和过定义控制比欠定义控制更常用。
与MIMO正弦控制一样,MIMO随机控制可以控制振动台之间和轴之间的相位。通过保持多维系统矩阵, Spider系统可以确定来自每个振动器对整体响应的贡献,并且对于每个振动器正确地区分,从而确保适当、准确、安全的控制。复杂的奇点问题通过一种优雅的解决方案来解决,该解决方案允许执行复杂的测试,而不必借助于测试分段来试图避免奇点。

晶钻仪器Spider 振动控制系统,模块设计最高可扩展到512通道数
在随机试验中,MIMO在每个目标谱中产生一个真正的随机信号。在MIMO随机控制中,控制品质与单个振动台随机控制是相同的。自适应控制保证了非线性响应发生时的快速均衡和精确控制,这还减少了到达全量级测试所需的时间。
MIMO振动控制系统功能:
访问Sentek三轴振动控制台 Sentek Dynamics Three-Axis Shakers here.