上世纪70年代,一批HP的工程师开发出了最早的数字式振动控制系统。他们在HP5451这款最早,最成功的信号分析仪上验证了多种闭环控制算法。HP5451是以HP2100为平台开发的,HP2100的储存空间和计算能力都非常有限。70年代早期,在一个被称作Time Date的公司内,两位发明家Edwin Sloane 和 Charles Heizman开发了随机振动控制器。Time Data后来被GenRad公司收购了,该项发明也成了频谱动力学的一部分。
上世纪90年代早期,IBM-PC在工业上得到了普及。很多公司开始用PC作为平台进行数据采集和动态信号分析。Date Physics公司联合Lansmont公司,开发了第一款基于PC的数字振动器,称为Lansmont TTVI控制器或DP540。
1996年,Joseph Driscoll ( Lansmont 公司总裁) and James Zhuge创建了Dactron公司,开发了下一代振动控制器。James Zhuge认为现有的技术存在技术上的缺陷,他找到了机遇改进了现有的技术。Dactron LASER公司将这些进步应用到产品,获得了巨大的成功。PC当时被作为一个外围设备一直沿用着。在新的控制器中,控制回路不通过PC。运用这一策略,采用浮点DSP结构,使得控制器回路时间更快,许多新的控制算法得以实现。
LASER是第一款采用多重浮点DSP处理器,24位A/D,USB连接计算机的振动控制器。早期的应用程序是基于微软MFC程序开发的。这一结构允许系统提供更多的功能,同时保持简洁的操作。数以千计的Dactron公司的LASER控制器被安装在世界各地。2001年,Dactron被LDS收购。后者是当时世界上最大的ED振动器制造商。现在LDS被B&K收购了。
2010年,美国晶钻仪器公司发布了Spider-81——下一代振动控制系统。Spider-81充分利用了现代化的硬件、信号处理算法和新的软件技术。
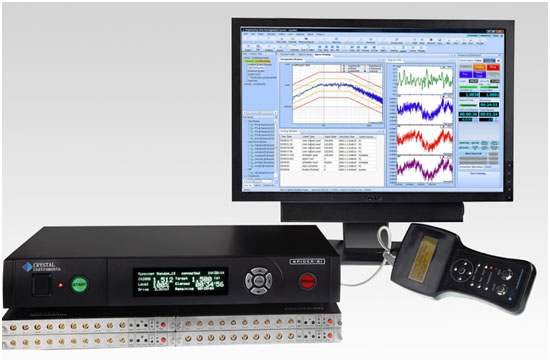
spider81第四代振动控制器
Spider-81是首款基于网络的振动控制器,并集成了IEEE 1588时间同步技术。其基本模块可配置4或8个输入通道,并可扩展成1024个通道。它具有高可靠性,高测量精确,高控制性能及易用性。
Spider-81被视为第四代的振动控制器,因为它将网络连接的时间同步性和嵌入式DSP技术融合在一起。这一策略极大的增加了控制的执行,系统可靠性和控制的失效保护。由于它是网络化的,使用者可以将控制器放直接在振动台附近操纵或在几百米远的控制室内操纵。
以下概述的是4代振动控制系统的结构:

4代振动控制系统的结构
实时性能
第一代振动控制器没有真正的实时系统。实时意味着每个控制信号的样本被用来计算下一个驱动信号的样本。早期的微型计算机在计算系统的传递函数时会跳过输入的数据帧。循环时间可达数秒之久。
第二代VCS是实时系统,所有的输入样本均用于计算驱动信号。该回路时间可达几分之一秒。利用PC可以极大地改善用户界面,并减少了产品费用。
第三代振动控制器产品可以称为“over-real-time”。它拥有多任务而相同输入数据的能力。例如,Dactron的随机控制器,多个控制回路可以同时运行,以满足不同频带的需要。在一个随机正弦波控制器极端的情况下,两个随机控制核心,加上12正弦控制内核,都可以同步运行。控制回路时间被极大的缩短为毫秒级。
第一代和第二代控制器试图满足测试件机械特性的需要。对与一些要求苛刻的应用,控制系统可能需要5 kHz的实时控制频宽,以及70 dB以上的控制动态范围。该状况在第三代VCS的出现而改变。由于使用了浮点处理器和Σ-Δ转换器,实时带宽控制和控制系统的动态范围远远超出了外部机械的要求。从那时起,提高VCS的带宽和控制动态范围已经无法实现客户的任何实际利益。它或多或少成了营销策略。