本文所描述的部分内容将在美国著名的电视《探索》频道(Discovery Channel)上播放。
机器人大擂台
终结者、机械战警、机械威龙以及机动战士高达(雾)等系列影视作品在1980~1990年代初的热播,“机器人战斗”这一概念在民众中初步建立,并引发讨论的热情。1992年,脑洞大开的工程师Marc Thorpe在设计遥控真空吸尘器的失败过程中,萌生了“以现有科技水平制作格斗机器人举办格斗大会”的念头。在数次失败的尝试后,1994年初Marc最终成功吸引了资本的注意,在三蕃市举办了第一届Robot Wars,并于媒体投放大量广告,利用“机器人”热潮吸引观众。
可惜的是,被杂志、报纸上大量经Photoshop加工的海报吸引而至、不明真相的群众却感受到了深深的欺骗。。。
宣传的时候是这样的
 这样的
这样的
 甚至这样的
甚至这样的
 观众的期待是这样的
观众的期待是这样的

这样的
 甚至这样的
甚至这样的

可现实中的参赛选手是,这样的
 这样的
这样的
 以及这样的
以及这样的
 。。。。。。。。。。
。。。。。。。。。。
机器人的攻击手段基本是这样的
 战斗场景基本是这样的
战斗场景基本是这样的
 。。。。。。。。。。。
。。。。。。。。。。。

好在,第一届比赛的举办起到了足够的宣传作用,尽管比赛本身不如人们期待般激烈精彩,但这一点同样激起了很多观众参与其中的欲望。“哎呀妈呀,这样的也能上啊?那我也能上。”。于是乎,《机器人大擂台》这个比赛节目就一届一届的举办下去,直到现在。
以上内容来自知乎,如果侵犯您的版权,。。。。
调侃完毕,下面进入今日主题《对战斗机器人的模态分析》。
对机器人的模态分析


图0 战斗机器人ICEWAVE battlebot
在机器人竞赛中,获胜者试图通过造成伤害或破坏关键部件来摧毁对手。在设计研发过程中,工程师通过模态试验获得机器人的固有频率、阻尼和模态振型,帮助识别结构中的薄弱环节。因此,模态分析获得机器人的模态参数,对机器人的设计和性能优化具有重要意义。
锤击法模态试验,采用力锤和单轴加速度传感器。由力锤激励的脉冲具有很宽的频率范围。为避免巡回响应法产生的质量附加效应,采用巡回激励法进行模态试验。
使用Spider-80X硬件和最新版EDM 10.0 模态软件进行锤击法模态试验。
 图1 机器人模态锤击试验
图1 机器人模态锤击试验
将桨叶模型划分成30个节点均匀分布的网格,以获得良好的模态振型空间分辨率。使用弹性绳悬挂机器人,模拟自由-自由边界条件(如上图所示)。用金属锤头的力巡回敲击每个测量点,使用粘贴在测点上的单轴加速度传感器捕捉冲击激励的响应。测量垂直桨叶方向上的激励和响应有助于获得面外模态振型。
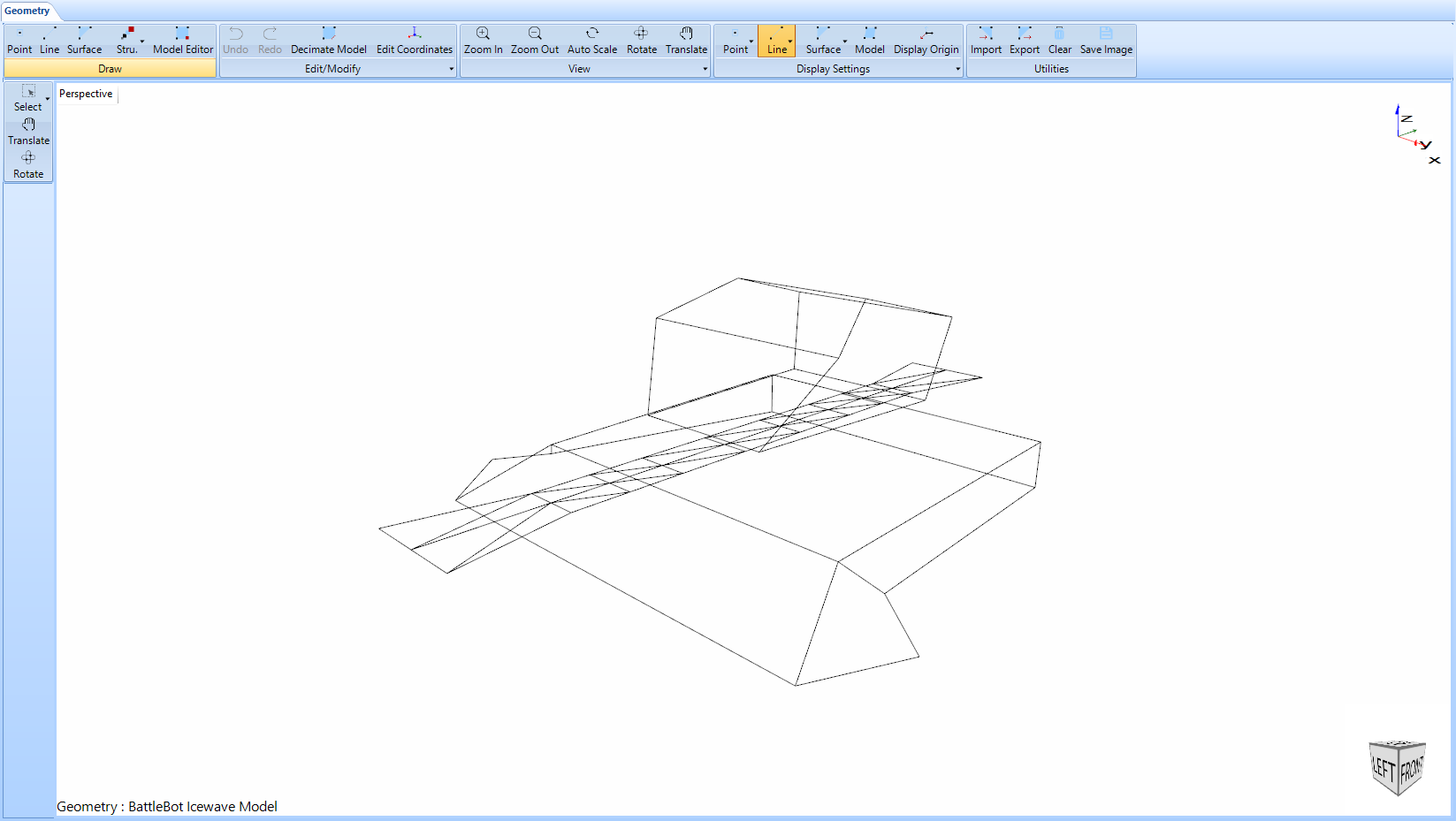 图2 机器人几何模型
图2 机器人几何模型
我们对机器人结构3.5kHz频率范围内的模态感兴趣,因此设置采样率为8kHz,块大小为8192,从而得到0.9765Hz的精细频率分辨率。每个测量自由度上对3帧数据进行线性平均,可以获得更高精度和降噪后的测量结果。
使用金属锤头的力锤容易激发3.5kHz频率范围的脉冲。使用较大的块大小能确保响应自然衰减,而无需引入力-指数窗函数。这种块大小的另一个优势是可以获得更精细的频率分辨率。通过这些设置,不会产生频谱泄露,可以使用均匀窗函数。
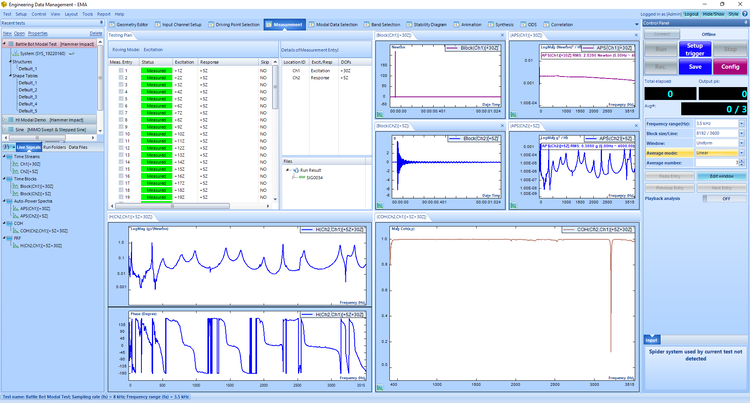 图3 机器人锤击激励测量
图3 机器人锤击激励测量
相干图可用于验证测量结果,从上图的相干图可以看出测量结果不错。相干图的谷值出现在反共振频率处,说明在对应频率处的响应水平相对较低。总体来说,输入和输出在分析频率范围内是相关的。
从模态数据选择选项卡中可以看到,测量频响信号的激励和响应自由度可以相互自由切换。
频响曲线显示在3.5kHz分析频率范围内有良好的峰。将30个实测频响叠加,可以识别出几阶模态振型。峰重叠良好说明测量结果较好,没有产生质量附加效应。
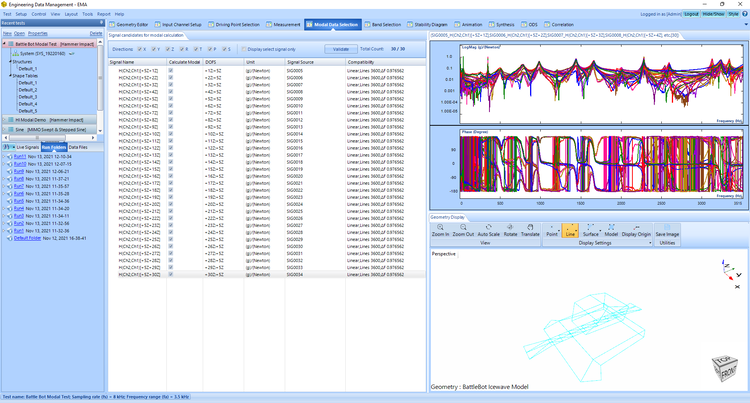 图4 模态数据选项卡显示叠加后FRF的幅值和相位
图4 模态数据选项卡显示叠加后FRF的幅值和相位
复模态指示函数(CMIF)用于指示分析频率范围内的模态。此外,还可以通过求和频响函数来识别模态。采用新的Poly-X算法对频响函数进行曲线拟合,得到如下稳定性图。在所需的频率范围内选择六阶柔性模态。
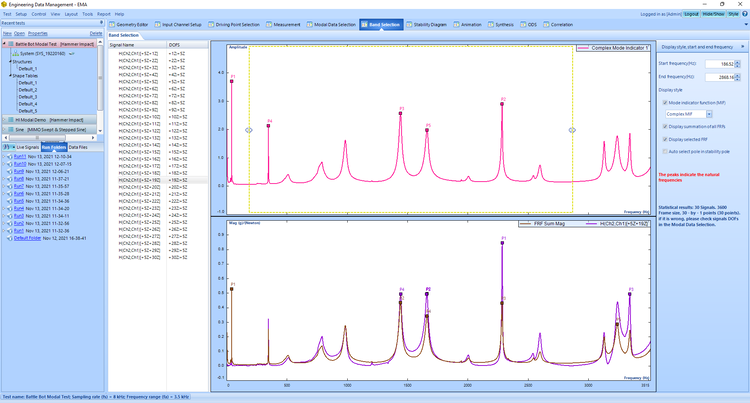 图5 在分析频率范围内通过模态指示函数定位和识别模态
图5 在分析频率范围内通过模态指示函数定位和识别模态
选取稳态极点,得到感兴趣模态的固有频率和阻尼比。通过残差计算获得与每阶模态相关联的模态振型。
 图 6 40 Hz 时机器人的一阶弯曲模态
图 6 40 Hz 时机器人的一阶弯曲模态
 图 7 345 Hz 时机器人的一阶扭转模态
图 7 345 Hz 时机器人的一阶扭转模态
 图 8 509 Hz 时机器人的高阶弯曲模态
图 8 509 Hz 时机器人的高阶弯曲模态
 图9 2004Hz时机器人的弯曲和扭转模态综合
图9 2004Hz时机器人的弯曲和扭转模态综合
通过快速扫描测量频响数据集,可以将机器人在每个频率的变形可视化。通过这些频谱数据,我们知道各阶模态是解耦的,因此可以使用ODS功能分析和研究在这些不同频率上的工作变形和扰度。
 图10 机器人的频域ODS
图10 机器人的频域ODS
结尾
首先感谢您的不离不弃,用极大的耐心将该篇文章阅读完。
模态实验进行了一下午,就顺利的结束了,我们也满意的拿到了ICEWAVE battlebot模态参数,验证了其战斗的可靠性,并根据模态数据给予专业的技术评估和建议,改善其力学特性,以便能发挥最大的破坏力及抗击打能力。
实验最后,ICEWAVE battlebot给实验现场的人来了一场真人秀,并当场砸碎了几个机器人以及周围的垃圾桶,因为保密的原因我们无法将现场的图片和视频发给各位欣赏,但是ICEWAVE battlebot 将会在电视《探索》频道(Discovery Channel)上出现,我们期待大赛中,它能够取得优异的成绩。届时我们会发送相关的表演给大家分享。