由于转子不平衡而造成机器振动过大是现实中经常会遇到的情况,有时候进行动平衡是必要的。不平衡的物理因素是转子质量分布不均匀,或者安装时转轴不对中,导致转子实际旋转轴和中心惯性轴不重合。
按照不平衡的原理来分,不平衡通常可以分为两种类型的不平衡:静不平衡和力偶不平衡。而实际中的动不平衡通常是这两者的矢量合成。
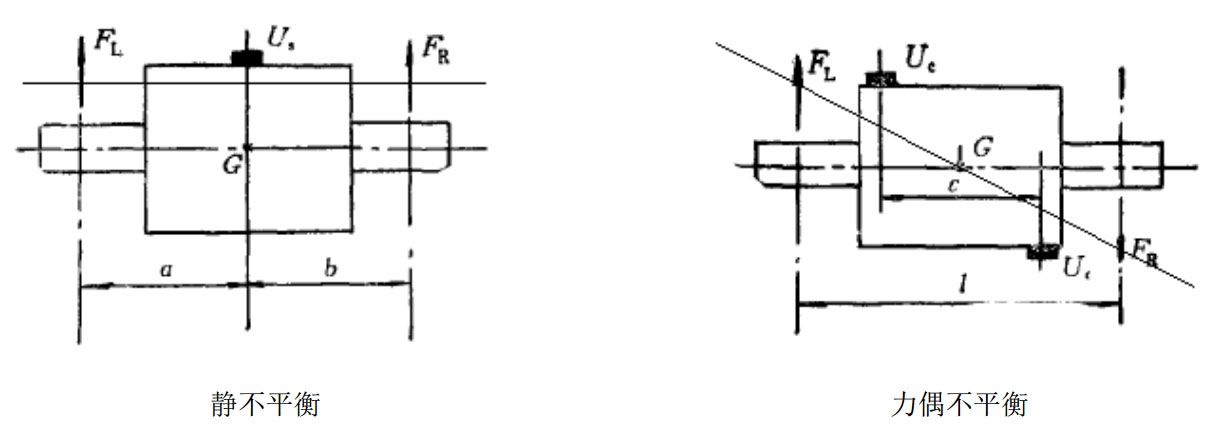
这两类的不平衡可以由上图表示。实线表示的是转子的中心惯性轴,虚线是实际的旋转轴。
静不平衡两轴平行,对于这种不平衡我们可以通过一个面来校正。力偶不平衡惯性轴通过转子重心且与转轴相交。这种不平衡表现的特征是转子两支撑做的振动相位大概相差 180 度。实际应用中,大部分情况是这两种不平衡的矢量合成,结果就是惯性主轴
既不通过质心也不平衡转轴,这是我们需要两个面来做校正。
动平衡的目的就是找出这一个或两个重点的质量和位置,但遗憾的是,除非我们已经做过相关的实验,不然没法准确知道它的重量,为此我们需要通过一些间接的方法来达到这个目的。对于刚性转子,通常可以认为这是一个线性的系统,因此可以使用影响系数法来做动平衡校正计算质量和位置。
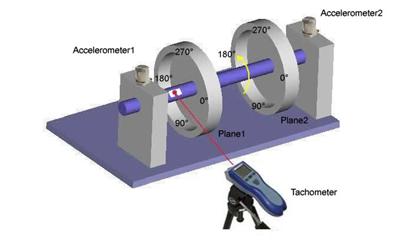
动平衡模拟图
上图是做双面动平衡比较典型的示意图。包括转子系统,转速计和加速度计。转子系统是待测的转子。转速计用来计算转速,同时提供相位参考信号,加速度计则可以用来计算振动幅度和相位。
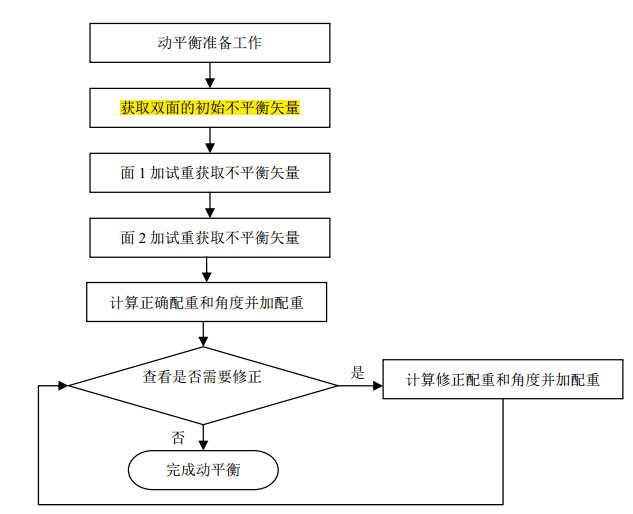
假设这个系统是线性的,那么通过在两个面上加重量,我们可以得到两个面的不平衡量改变程度,从而得到影响因子。面1和面2是相互影响的,因此对于双面动平衡我们必须知道加在一个面上的重量对两个面的影响,为此必须再两个面都分别加重测得他们的影响系数,然后通过这些系数和原始的不平衡矢量来计算所需的重量和角度。其具体的流程图可以参考下图。