要进行动平衡,首先需要确定机器处于不平衡状态,即机器的振动大部分是由转子的不平衡造成的。如果不能确认这点,那么动平衡结果将不理想,可以使用 CoCo-80/90附带的 Onsite measurement 功能查看振动频谱来确认。
确认机器处于不平衡状态后,停止机器转动。将 CoCo-80/90 摆放在合适位置,启动 CoCo-80/90,并进入 VDC 模式。安装测速计和加速度传感器,在转轴适当位置粘贴反射带(coco 中该点的位置被定义为 0 相位)。
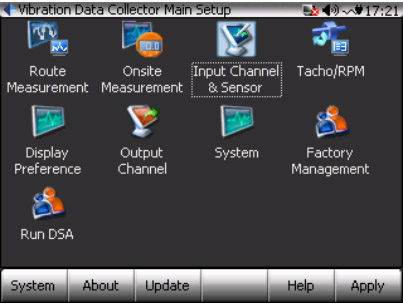
安装好这些设备后,接下来需要设定 channel table。如图1,选择 Input Channel &Sensor 选项,进入后图 2,按 F1 选择修改 channel table 设定,进入后如图 3。
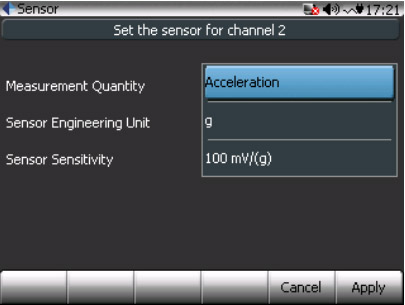
- Sensor 选项下,按回车键后可进入量纲设置页面,如图 4。对应不同的传感器,选择相应的 Measurement Quantity,这里由于使用了加速度传感器,我们使用Acceleration。选择合适的 Unit和 Sensitivity,后者的选取必须与传感器的标称值一致。
- Input Mode 选项选择信号输入方式,这里使用 IEPE(必须与传感器的工作方式匹配)。
- High Pass 选项选择合适的高通滤波截止频率。可以按照如下方式估计动平衡工作的频率:f=RPM/60,RPM 是机器进行动平衡的转速,f 即频率值。
- Status 选项可以选择打开或者关闭该通道。